将
扫描仪埋入地下,通常可以用于从固定点拍摄图像,来连续观察并研究根系的发育动态。因此,已经有开发的软件来支持实验人员从扫描的图像中定量分析根系性状。然而,图像处理仍然是一项耗时的工作。深度学习作为一种以像素为单位识别物体的方法已经取得了令人瞩目的成果。在这项研究中,我们尝试使用卷积神经网络自动进行细根的图像分析。使用根系自动跟踪和分析 (ARATA)软件,我们成功地从扫描图像中提取了细根,并计算了细根的投影面积以实现长期动态监测。我们的软件能够自动处理在各个研究地点采集的扫描图像,并可以在较长时间内加速根系动力学的研究。
如图1所示,ARATA软件使用的是带有 Xception 的 DeepLabv3+算法。在网络中,语义信息被编码以识别形成特征类别的像素集合,例如根。通过将输入图像从输入层处理到输出层,将其汇集在atrous空间金字塔池化模块中。随后,对该信息进行解码,并生成每个像素包含在根图像中的概率。在我们的模型中,我们使用Pixel Shuffler添加了上采样层,并在输出层之前添加了一个3 × 3卷积层。
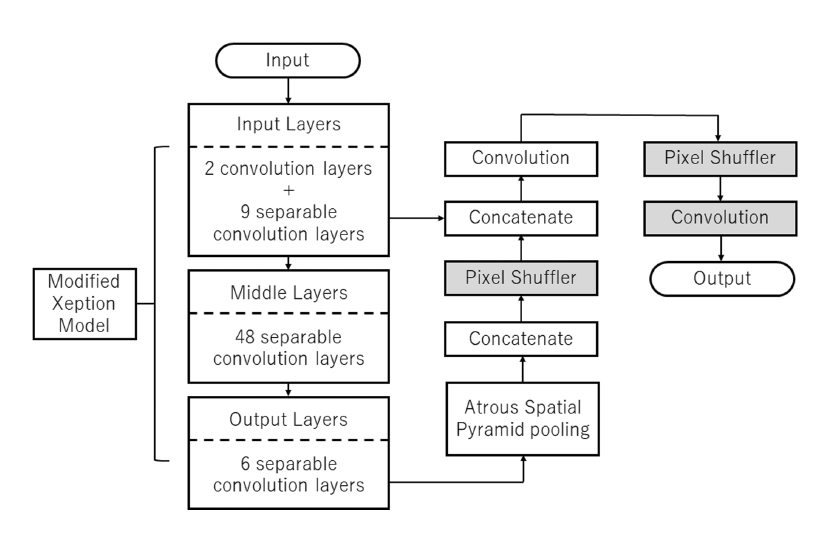
图1 ARATA中使用的深度学习网络。灰色框代表原始DeepLabv3+模型的附加过程。在输出层中添加了像素混洗器和卷积层用来生成高分辨率特征图。
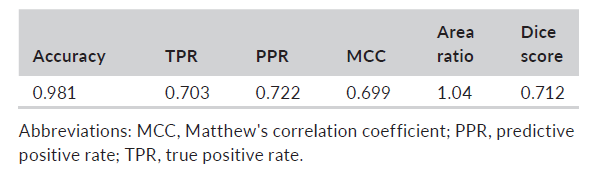
图2 根自动检测与人工分割对比的评价结果
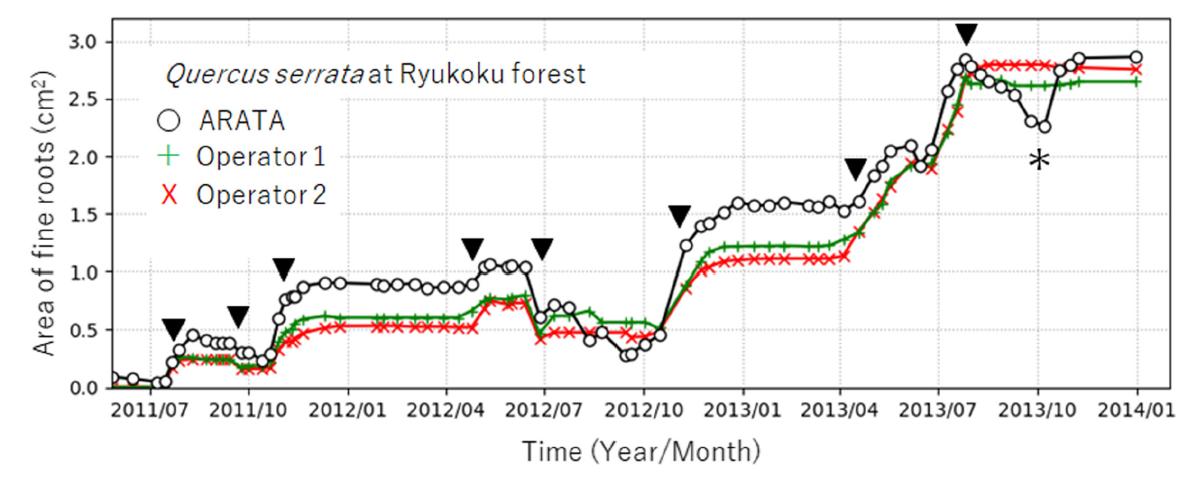
图3 77幅Ryukoku森林中锯缘栎林的时间序列扫描图像的ARATA和人工提取细根区域结果的比较。特征性的时间变化,例如细根面积的增加或减少,被正确捕获(倒三角形)。用ARATA获得的趋势与通过手动测量获得的趋势不同的情况用星号
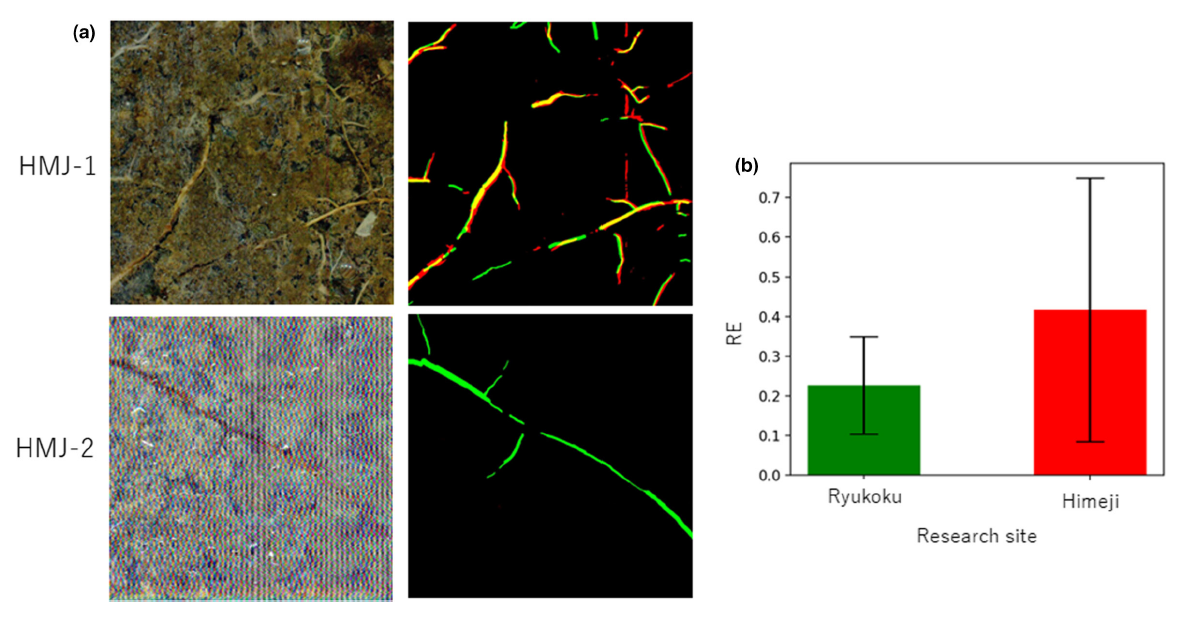
图4 ARATA 用少量测试站点训练数据(Himeji)提取细根的结果。(a)绿线为人工提取结果,红线为ARATA提取结果,黄色部分表示两次提取结果匹配的部分。图像 HMJ-1是ARATA良好提取的一个示例。图像HMJ-2质量较差的一个示例,表明ARATA无法提取存在的根。(b)比较5 幅来自Ryukoku 站点的图像和15 幅来自Himeji 站点的图像的相对误差 (RE) 的平均值。训练数据基于来自 Ryukoku 的220张原始图像,但来自 Himeji 的只有20张原始图像。
来源Yabuki, A., Ikeno, H., & Dannoura, M. (2022). A root auto tracing and analysis (ARATA): An automatic analysis software for detecting fine roots in images from flatbed optical scanners. Methods in Ecology and Evolution.